Mida vaja?
Suuremosa komponente saad osta Oomipoest
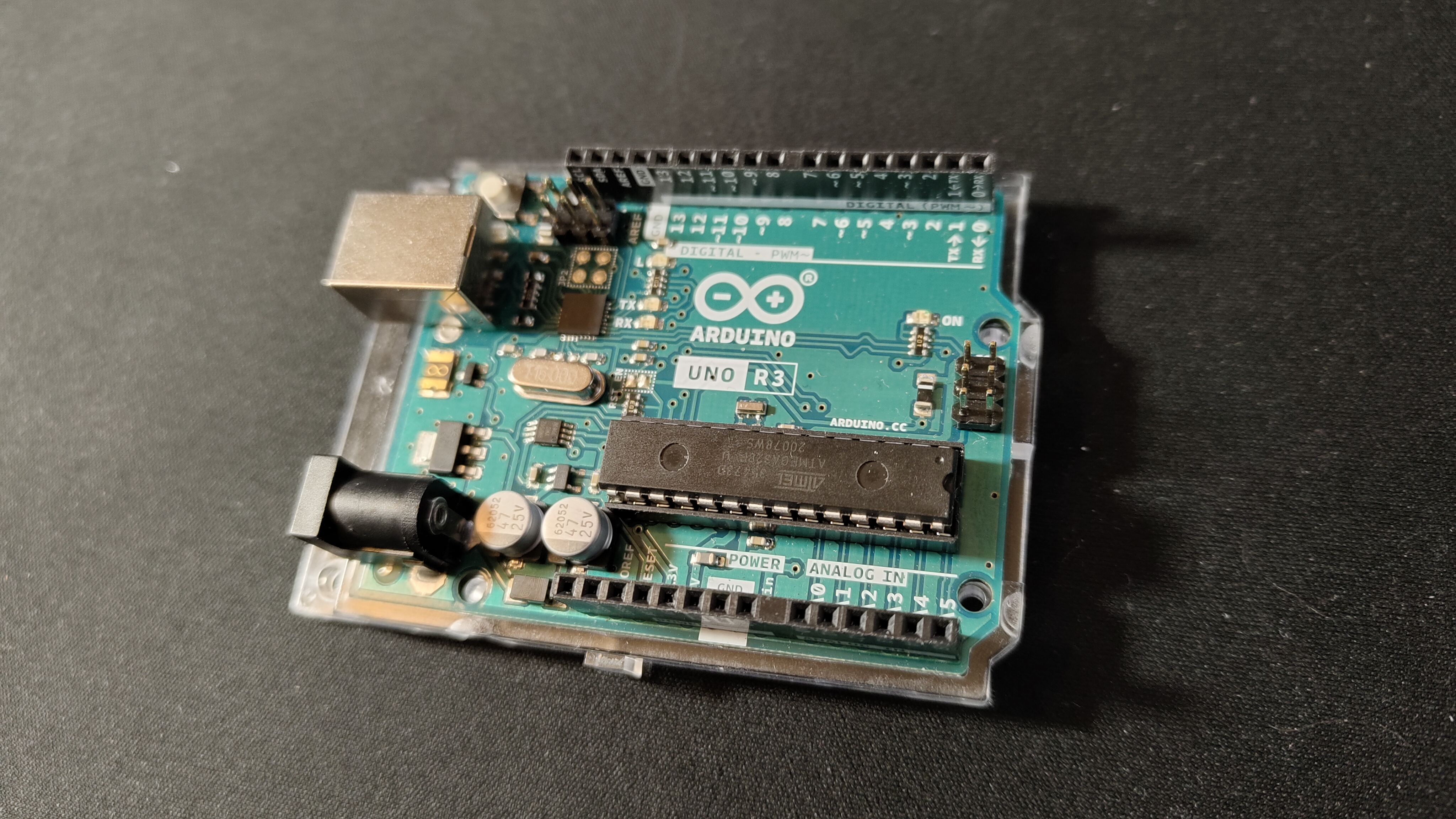
Mikrokontroller
Mikrokontroller toimib roboti "ajuna", koordineerides selle tegevusi ja tehes otsuseid sisestatud koodi põhjal. Mikrokontroller juhib mootoreid ja ajameid, näiteks rattaid, andes neile juhiseid liikumiseks või muude ülesannete täitmiseks. Samuti loeb see sisendeid erinevatelt sensoritelt - näiteks kaugus-, valgus-, temperatuuri- ja puutesensoritelt -, et robot saaks oma ümbrust paremini mõista ning sellele reageerida.
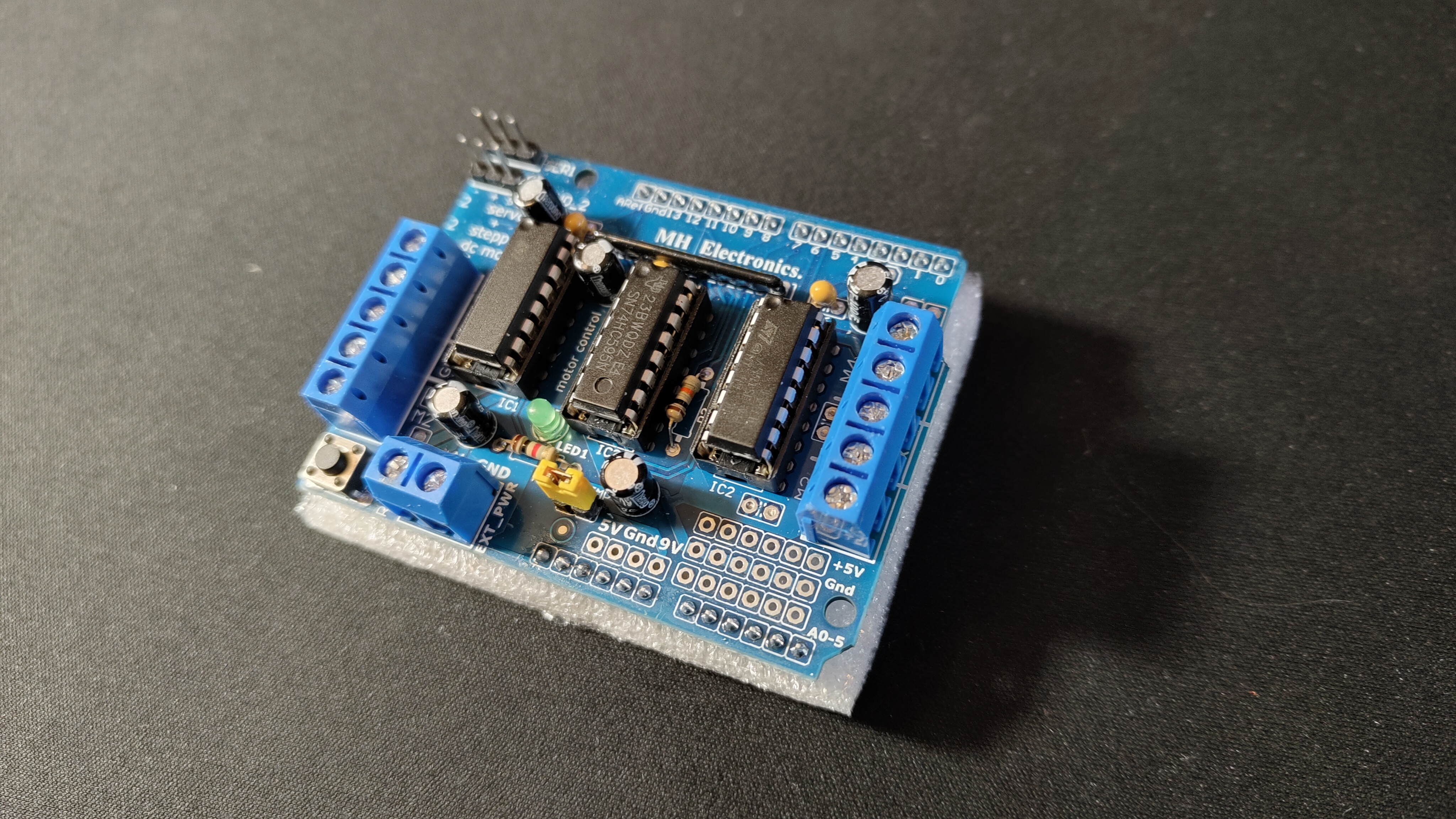
Mootori juhtimis moodul
Komponent, mis võimaldab juhtida mootoreid, näiteks roboti rataste liikumist või muid mehaanilisi liikumisi. See moodul ühendab roboti juhtarvuti (näiteks mikrokontrolleri või arduino) ja mootori(d), võimaldades edastada elektrilisi signaale, mis kontrollivad mootori kiirust, suunda ja jõudu. See on vajalik, kuna mikrokontroller ei suuda toita mootoreid üksinda ning abistab täpsete liikumiskäskude täitmisel.
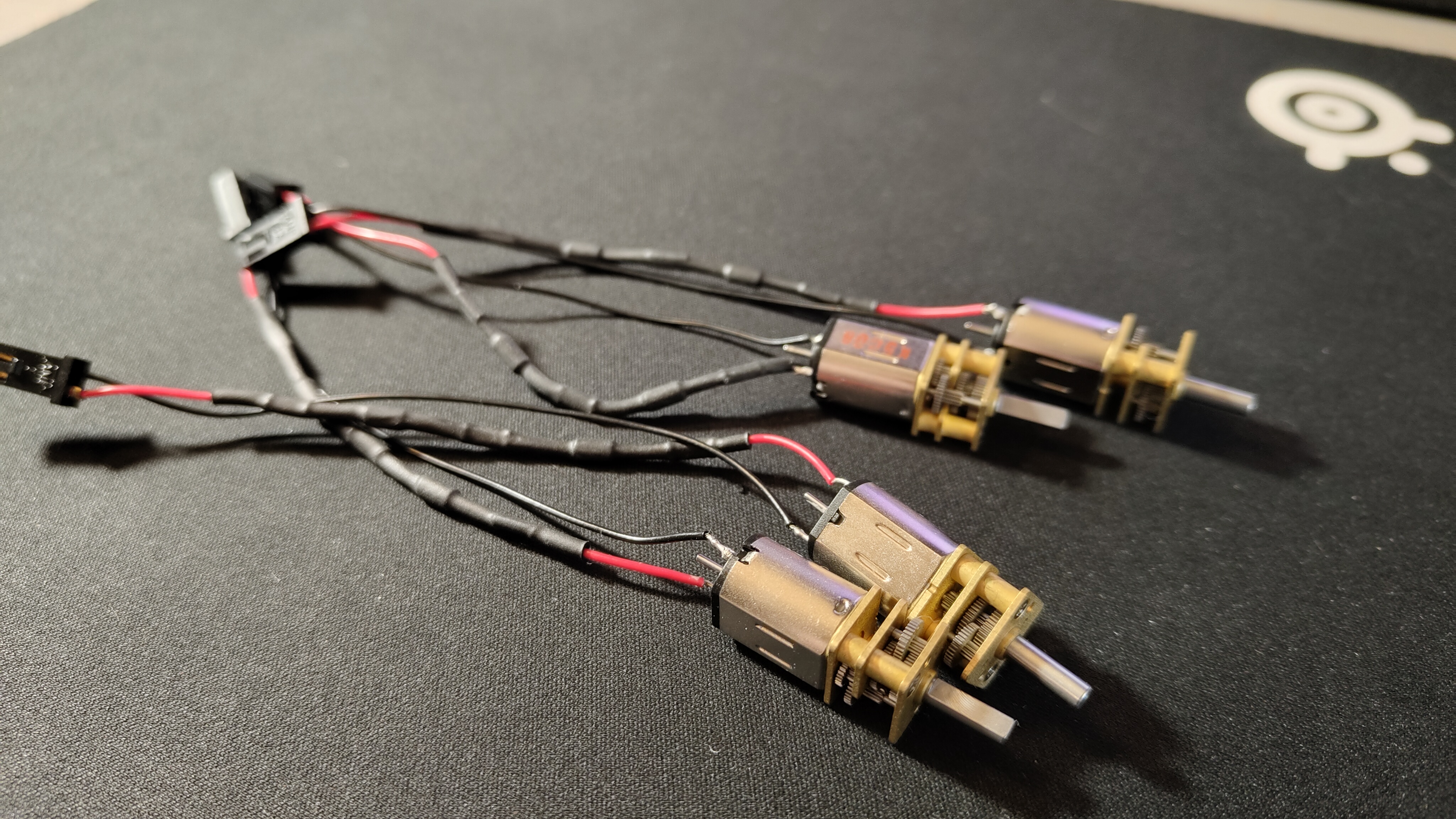
Mootor
Mootoreid on erinevaid tüüpi, kuid selle projekti jaoks kasutame DC-mootired, mis juhivad rattaid, et robot saaks liikuda edasi, tagasi või pöörata. Sensorite abil saab jälgida pöörlemise täpsust ja kiirust, võimaldades robotil navigeerida täpsemalt. Mootorite arvust ja paigaldusest tuleneb roboti liikumisvabadus.
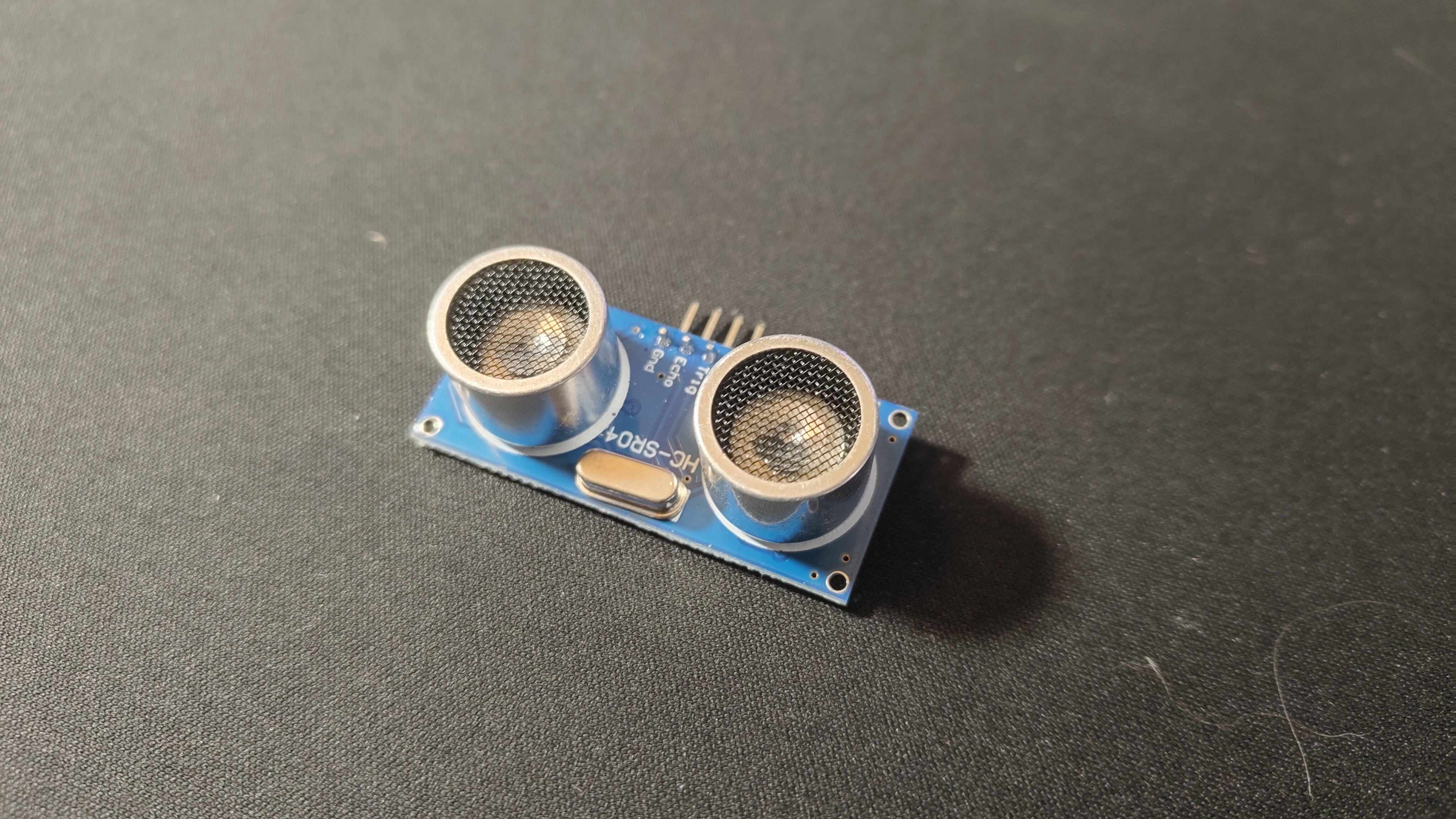
Sensorid
Sensorid annavad robotile võimaluse oma keskkonda „tajuda” - näha, kuulda, tunda ja mõõta ümbritsevat, et kohandada oma tegevusi saadud teabe põhjal. Tänu sensoritele saavad robotid töötada iseseisvalt ja reageerida kiiresti muutuvatele tingimustele. Selles projektis kasutame kaugussensorit, mis mõõdab vahemaid objektideni kasutades helilaineid, võimaldades robotil takistusi tuvastada ja vältida.
Aku/Patarei
Aku on üks peamisi energiavarusid, mis võimaldab robotil töötada autonoomselt ilma juhtmevaba ühenduseta. Aku annab elektrit kõikidele komponentidele, sealhulgas mootoritele, anduritele ja mikrokontrollerile. Projektiks kasutame tavapoes müüdavaid 9V patareid.

Rattad
Rattad on üks lihtsamaid ja levinumaid liikumisviise, kuna need võimaldavad sujuvat ja täpset liikumist erinevatel pindadel. Otsustasime need 3D-printida, kuid saad kasutada ka kodust leiduvaid ümaraid objekte, näiteks pudelikork.

Juhtmed
Juhtmed on robotis olulised, kuna need ühendavad erinevad komponendid, näiteks aku, mootorid, mikrokontrolleri ja andurid, võimaldades elektrienergia ja signaalide edastamist. Juhtmete kvaliteet ja paigutus mõjutavad otseselt roboti töökindlust ja tõhusust.

Lüliti
Lüliti abil on mugav lahti ühendada aku väljaspool korpust.

Kere
Roboti kere ehk raam on roboti füüsiline struktuur või "skelett", mis ühendab ja toetab kõiki selle komponente, nagu mootorid, akud, mikrokontroller, sensorid ja muud osad. Roboti kere mängib olulist rolli selle vastupidavuses, stabiilsuses ja liikumises ning on oluline osa roboti disainist. Selle projekti roboti 3D-mudeli skelettist ja ratastest saad siit












